TEMA 1
¿Por qué el sistema binario es el más usado por los ordenadores?
Explicad qué es el código Unicode
es un estándar de codificación de caracteres diseñado para facilitar el tratamiento informático, transmisión y visualización de textos de múltiples lenguajes y disciplinas técnicas además de textos clásicos de lenguas muertas.
¿Qué es BCD y EBCDIC?
es un sistema numérico usado en sistemas computacionales y electrónicos para codificar números enteros positivos y facilitar las operaciones aritméticas. Es un código ponderado debido a que cada posición numérica tiene un peso específico.
es un código estándar de 8 bits usado por computadoras mainframe IBM. IBM adaptó el EBCDIC del código de tarjetas perforadas en los años 1960 y lo promulgó como una táctica customer-control cambiando el código estándar ASCII.
¿Qué es el ASCII?
Es un código de caracteres basado en el alfabeto latino tal como se usa en inglés moderno y en otras lenguas occidentales.
¿Por qué el octal y el hexadecimal son tan usados en medios informáticos?
TEMA 2
¿Qué es el lenguaje máquina?
Es el sistema de códigos directamente interpretable por un circuito microprogramable, como el microprocesador de una computadora o el microcontrolador de un autómata (un PLC). Este lenguaje está compuesto por un conjunto de instrucciones que determinan acciones a ser tomadas por la máquina.
¿Y el lenguaje de alto nivel?
Se caracteriza por expresar los algoritmos de una manera adecuada a la capacidad cognitiva humana, en lugar de a la capacidad ejecutora de las máquinas.
¿Cuáles son las generaciones de los ordenadores?
-Primera generación
Con el UNIVAC-1 se comienza la primera generación.
En esta etapa se caracterizan por el empleo de tubos de vacío en su circuito. Son enormes y pesados y con alto consumo y muy limitadas.
Segunda generación
Desde 1958 con las máquinas de circuitos transistorizados como elemento electrónico reemplazando al tubo. Mucho menor consumo y tamaño mucho menor y aumento de fiabilidad. Ya trabajan con los llamados leguajes de programación.
Tercera generación
En 1964 IBM 360 cuyas placas de circuito impreso se reemplazan por circuitos integrados que son placas de de silicio que reciben el nombre de chips, lo que permite reducir aún más el tamaño y reducir aún más el consumo y aumentar la fiabilidad. Ya se trabaja con multiprogramación y el teleproceso y lenguajes de alta programación como Cobol y Fortran.
Cuarta generación
Comienza en la década de los 60`s con la utilización de memorias electrónicas en vez de núcleos de ferrita, con lo que aumentamos la velocidad y volvemos a reducir el tamaño. Un solo chip de silicio de un centímetro cuadrado almacena 64.000 bits de información. Procesamiento en tiempo real y proceso interactivo y gran capacidad de memoria.
Quinta generación Primera generación
Con el UNIVAC-1 se comienza la primera generación.
En esta etapa se caracterizan por el empleo de tubos de vacío en su circuito. Son enormes y pesados y con alto consumo y muy limitadas.
A finales de los 70`s con la aparición de los microcomputadores y los ordenadores de uso personal comienza esta generación. Utilizan un microprocesador circuito integrado que admite en un sólo chip de silicio las principales funciones de un ordenador. Los microcomputadores actuales pueden tener entre 4Mb y 32Mb de memoria con capacidades del orden de varios Gigabytes y pueden permitir la utilización simultánea del equipo por varios usuarios.
Y seguimos avanzando…
¿Qué son las memorias de semiconductores?
Usa circuitos integrados basados en semiconductores para almacenar información. Un chip de memoria de semiconductor puede contener millones de minúsculos transistores o condensadores. Existen memorias de semiconductor de ambos tipos: volátiles y no volátiles.
¿Qué significa MFLOPS?
Siglas cuyo significado equivale a millones de operaciones de coma flotante por segundo. Suele usarse para determinar la capacidad de un ordenador....
Explicad detenidamente cuáles son los componentes del procesador.
Procesador se compone de cinco elementos:
• Memoria.
• Unidad Aritmético-Lógica ALU ("Arithmetic and Logic Unit")
• Unidad de Control CU ("Control Unit")
• Bus interno.
• Conexiones con el exterior.
Explicad detenidamente cuáles son los componentes de la Unidad de Control en una máquina Von Neumann
Procesador, memoria y dispositivos de entrada/salida (E/S).
Explicad detenidamente los procesos de captación y ejecución de una instrucción en una CPU. Incluid ejemplos.
¿Por qué Blu-Ray no tiene la e de "Blue", que correspondería a "Azul" en inglés?
La letra e de la palabra original blue fue eliminada debido a que, en algunos países, no se puede registrar para un nombre comercial una palabra común.
Explicad cuál es la evolución actual de las ROM.
Tipos de software que hay en el ordenador, de acuerdo al tipo de trabajo que realiza o bien basadas en el método de distribución.
SOFTWARE DE SISTEMAS: Son aquellos programas que permiten la administración de la parte física o los recursos de la computadora, es la que interactúa entre el usuario y los componentes hardware del ordenador. Se clasifican el Sistemas Operativos Monousuarios y Multiusuarios.
SOFWARE DE APLICACION: Son aquellos programas que nos ayudan a tareas especificas como edición de textos, imágenes, cálculos, etc. también conocidos como aplicaciones.
¿Quién se encarga de la gestión de recursos en el ordenador?
EL ADMINISTRADOR DE PROCESOS?
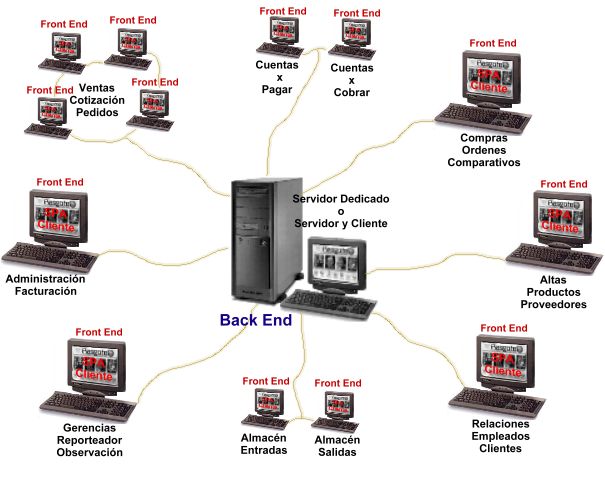
¿Cuál es la diferencia entre sistemas operativos en red y distribuidos?
La diferencia fundamental entre un sistema en red y uno distribuido se puede explicar a través del análisis de la localización del módulo de comunicaciones entre procesos.
Exponed el nivel de jerarquía de las memorias.
Los niveles que componen la jerarquía de memoria habitualmente son:
• Nivel 0: Registros
• Nivel 1: Memoria caché
• Nivel 2: Memoria principal
• Nivel 3: Disco duro (con el mecanismo de memoria virtual)
• Nivel 4: Redes(Actualmente se considera un nivel más de la jerarquía de memorias)
TEMA 3
Haced un esquema general de la placa base y describir brevemente sus componentes principales.
• Chipset
• Zócalo para microprocesador
• Zócalos de memoria
• Conector de alimentación ATX
• Ranura de expansión AGP
• Ranuras de expansión PCI
• Ranuras de expansión ISA
• Reloj
• Memoria ROM / BIOS
• Batería
• Controladores IDE
• Controlador disquete
• Jumpers
• Microinterruptores
• Puerto paralelo (LTP1)
• Puertos serie (COM1 / COM2)
• Puertos PS/2
• Puertos USB
• Conectores botón POWER / RESET
• Conectores para LED
Realizad un pequeño esquema de las conexiones del Northbridge y el Southbridge
¿Qué significa SLI?
Es un método para conectar dos o más tarjetas de vídeo (tarjeta gráfica) y que produzcan una sola señal de salida.
¿Qué significa S/PDIF?
Consiste en un protocolo a nivel de hardware para la transmisión de señales de audio digital estéreo moduladas en PCM entre dispositivos y componentes estereofónicos.
¿Por qué a los puertos serie se les llama tipo D?
¿Por qué necesita el northbridge un ventilador?
¿De qué tipo son los conectores hembra en un ordenador?
¿Qué es un Hub para un USB?
Es un dispositivo que permite concentrar varios puertos USB (Universal Serial Bus: bus universal en serie), permitiendo la conexión con una máquina mediante un solo bus.
¿Cuál es el límite de conexión de la interfaz USB?
• USB 1.0
• USB 1.1
• USB 2.0
• USB 3.0
Esbozad el diagrama de bloques de las arquitecturas de procesador tanto anteriores como de doble núcleo.
Diagramas de bloques de procesadores:
• Intel 8080
• Intel 8086
• Intel 80486
• Intel Pentium
• Hewett Packart PA
• SUN Spark
• Digital Apha
¿Qué es el FSB?
Es el tipo de bus usado como bus principal en algunos de los antiguos microprocesadores de la marca Intel para comunicarse con el chipset.
¿Qué es el BSB?
Se refiere a la conexión entre un microprocesador y su memoria cache externa, en particular y comúnmente la de segundo nivel o L2.
¿Cuántos niveles de caché puede haber?
Caché L1 (Nivel 1 o primario)
La caché L1 fue desarrollada para estar instalada físicamente dentro de los circuitos de microprocesador y no sobre el motherboard como inicialmente sucedió con la caché L2.
Caché L2 (Nivel 2 o secundario)
Cada vez que el procesador solicita información de la memoria principal, el controlador de caché verifica primero si esos datos ya están cargados en la memoria caché.
¿Qué es la SSE4?
Es sistema de instrucción para Intel Base microarchitecture, puesto en ejecución inicialmente en Penryn procesador.
¿A qué nos referimos cuando hablamos de arquitecturas de 32, 64 o 128 bits? ¿Conoces alguna máquina de 128 bits?
Es la longitud de palabra que puede manejar el ordenador.
¿Qué es el límite de memoria de 4 Gb?
viernes, 26 de noviembre de 2010
miércoles, 24 de noviembre de 2010
Sistema de Gestion de Memoria
-Compartición: Cualquier mecanismo de protección que se implemente debe tener la flexibilidad de permitir el acceso de varios procesos a la misma zona de la memoria principal. El sistema de gestión de memoria debe permitir accesos controlados a las áreas compartidas de la memoria, sin comprometer la protección básica.
Organización: La mayoría de los programas se organizan en módulos. El S.O. y el hardware del ordenador pueden tratar de forma efectica los programas del usuario y los datos en forma de módulos de algún tipo, se conseguirá una serie de ventajas tales como:
Los módulos pueden escribirse y compilarse independientemente mientras que el sistema resuelve durante la ejecución todas las referencias de un módulo a otro.
Con un escaso coste adicional,pueden otorgarse distintos grados de protección a los distintos módulos.
Se pueden introducir mecanismos por medio de los cuales los procesos puedan compartir módulos. La ventaja de compartir, es que se corresponde con la visión de problema que tiene el usuario, y por lo tanto, es fácil para el usuario especificar el comportamiento que desea.
Organización física
Sabemos que la memoria del ordenador se organiza en al menos dos niveles: La memoria principal y la memoria secundaria. La tarea de mover información entre dos niveles de memoria es responsabilidad del S.O
Organización: La mayoría de los programas se organizan en módulos. El S.O. y el hardware del ordenador pueden tratar de forma efectica los programas del usuario y los datos en forma de módulos de algún tipo, se conseguirá una serie de ventajas tales como:
Los módulos pueden escribirse y compilarse independientemente mientras que el sistema resuelve durante la ejecución todas las referencias de un módulo a otro.
Con un escaso coste adicional,pueden otorgarse distintos grados de protección a los distintos módulos.
Se pueden introducir mecanismos por medio de los cuales los procesos puedan compartir módulos. La ventaja de compartir, es que se corresponde con la visión de problema que tiene el usuario, y por lo tanto, es fácil para el usuario especificar el comportamiento que desea.
Organización física
Sabemos que la memoria del ordenador se organiza en al menos dos niveles: La memoria principal y la memoria secundaria. La tarea de mover información entre dos niveles de memoria es responsabilidad del S.O
Actividades disco duro
Analiza en la web los diferentes comandos para particionar y formatear un disco duro:
En Windows FDISK y en Linux CFDISK
¿Cual es la estructura logica y fisica de un disco duro?
- Estructura fisica: Una de las dos superficies magnéticas de cada plato se denomina cara. El número total de caras de un disco duro coincide con su número de cabezas. Cada una de estas caras se divide en anillos concéntricos llamados pistas. En los discos duros se suele utilizar el término cilindro para referirse a la misma pista de todos los discos de la pila. Finalmente, cada pista se divide en sectores.
- La estructura lógica de un disco duro está formada por:
El sector de arranque (Master Boot Record)
Espacio particionado
Espacio sin particionar
¿Es necesario particionar y formatear un disco duro para utilizarlo?
-Si
¿Es obligatorio tener una particion primaria en el disco duro?
Los sistemas operativos deben instalarse en particiones primarias, ya que de otra manera no podrían arrancar
Enumera Herramientas de particiones en cualquier S.O
partition magic
En Windows FDISK y en Linux CFDISK
¿Cual es la estructura logica y fisica de un disco duro?
- Estructura fisica: Una de las dos superficies magnéticas de cada plato se denomina cara. El número total de caras de un disco duro coincide con su número de cabezas. Cada una de estas caras se divide en anillos concéntricos llamados pistas. En los discos duros se suele utilizar el término cilindro para referirse a la misma pista de todos los discos de la pila. Finalmente, cada pista se divide en sectores.
- La estructura lógica de un disco duro está formada por:
El sector de arranque (Master Boot Record)
Espacio particionado
Espacio sin particionar
¿Es necesario particionar y formatear un disco duro para utilizarlo?
-Si
¿Es obligatorio tener una particion primaria en el disco duro?
Los sistemas operativos deben instalarse en particiones primarias, ya que de otra manera no podrían arrancar
Enumera Herramientas de particiones en cualquier S.O
partition magic
Particiones y Sistema de Archivos
Particiones
-Los sistemas operativos no trabajan con unidades físicas directamente sino con unidades lógicas. Dentro de una misma unidad física de disco duro puede haber varias unidades lógicas. Cada una de estas unidades lógicas constituye una partición del disco duro. Esto quiere decir que podemos dividir un disco duro en, por ejemplo, dos particiones (dos unidades lógicas dentro de una misma unidad física) y trabajar de la misma manera que si tuviésemos dos discos duros (una unidad lógica para cada unidad física).
Sistemas de archivos
-Un sistema de archivos es una estructura que permite tanto el almacenamiento de información en una partición como su modificación y recuperación. Para que sea posible trabajar en una partición es necesario asignarle previamente un sistema de archivos. Esta operación se denomina dar formato a una partición.
Generalmente cada sistema de archivos ha sido diseñado para obtener el mejor rendimiento con un sistema operativo concreto (FAT para DOS, FAT32 para Windows 98, NTFS para Windows NT, HPFS para OS/2…). Sin embargo, es usual que el mismo sistema operativo sea capaz de reconocer múltiples sistemas de archivos. A continuación se comentan los sistemas de archivos más comunes.
FAT (File Allocate Table, tabla de asignación de archivos).
-Este sistema de archivos se basa, como su nombre indica, en una tabla de asignación de archivos o FAT. Esta tabla es el índice del disco. Almacena los grupos utilizados por cada archivo, los grupos libres y los defectuosos. Como consecuencia de la fragmentación de archivos, es corriente que los distintos grupos que contienen un archivo se hallen desperdigados por toda la partición. La FAT es la encargada de seguir el rastro de cada uno de los archivos por la partición.
Debido a que la FAT de este sistema de archivos tiene entradas de 16 bits (por eso, a veces se llama FAT16), sólo se pueden utilizar 216 = 65.536 grupos distintos. Esto implica que, con el fin de aprovechar la totalidad del espacio de una partición, los grupos tengan tamaños distintos en función del tamaño de la partición. Por ejemplo, con un grupo de 16 KB se puede almacenar hasta 216 grupos * 16 KB/grupo = 220 KB = 1 GB de información. El límite de la partición (2 GB) se obtiene al considerar un grupo máximo de 32 KB (formado por 64 sectores consecutivos de 512 bytes).
FAT32 (FAT de 32 bits)
-El sistema FAT32 permite trabajar con particiones mayores de 2 GB. No solamente esto, sino que además el tamaño del grupo (cluster) es mucho menor y no se desperdicia tanto espacio como ocurría en las particiones FAT. La conversión de FAT a FAT32, se puede realizar desde el propio sistema operativo Windows 98, o bien desde utilidades como Partition Magic. Sin embargo, la conversión inversa no es posible desde Windows 98, aunque sí desde Partition Magic.
VFAT (Virtual FAT)
Este sistema de archivos logra remediar uno de los mayores problemas del sistema FAT: los nombres de archivos y directorios sólo podían contener 8 caracteres de nombre y 3 de extensión. Con VFAT, se logra ampliar este límite a 255 caracteres entre nombre y extensión.
La mayor ventaja de VFAT es que tiene plena compatibilidad con FAT. Por ejemplo, es factible utilizar la misma partición para dos sistemas operativos que utilicen uno FAT y otro VFAT (MS-DOS y Windows 95). Cuando entremos desde MS-DOS, los nombres largos de archivos se transforman en nombres cortos según unas reglas establecidas, y pueden ser utilizados de la manera habitual. De todas maneras, hay que prestar cierta atención cuando se trabaja desde MS-DOS con archivos que tienen nombres largos: no se deben realizar operaciones de copiado o borrado, ya que se corre el riesgo de perder el nombre largo del archivo y quedarnos sólo con el corto. Desde Windows 95, se trabaja de forma transparente con nombres cortos y largos.
Tanto las particiones FAT como las VFAT están limitadas a un tamaño máximo de 2 GB. Esta es la razón por la que los discos duros mayores de este tamaño que vayan a trabajar con alguno de los dos sistemas, necesiten ser particionados en varias particiones más pequeñas. El sistema de arhivos FAT32 ha sido diseñado para aumentar este límite a 2 TB (1 terabyte = 1024 GB).
NTFS (New Technology File System, sistema de archivos de nueva tecnología).
-Este es el sistema de archivos que permite utilizar todas las características de seguridad y protección de archivos de Windows NT. NTFS sólo es recomendable para particiones superiores a 400 MB, ya que las estructuras del sistema consumen gran cantidad de espacio. NTFS permite definir el tamaño del grupo (cluster), a partir de 512 bytes (tamaño de un sector) de forma independiente al tamaño de la partición.
Las técnicas utilizadas para evitar la fragmentación y el menor desaprovechamiento del disco, hacen de este sistema de archivos el sistema ideal para las particiones de gran tamaño requeridas en grandes ordenadores y servidores
HPFS (High Performance File System)Es el sistema de archivos propio de OS/2.
-Utiliza una estructura muy eficiente para organizar los datos en las particiones.
No utiliza grupos sino directamente sectores del disco (que equivalen a un grupo de 512 bytes). En vez de utilizar una tabla FAT al principio de la partición, emplea unas bandas distribuidas eficazmente por toda la partición. De esta forma se consigue, suprimir el elevado número de movimientos que los cabezales de lectura/escritura tienen que realizar a la tabla de asignación en una partición FAT. El resultado de este sistema es una mayor velocidad de acceso y un menor desaprovechamiento del espacio en disco.
EXT4
El cuarto sistema de archivos extendido, es un sistema de archivos con registro por diario como una mejora compatible de ext3
-Posee un soporte de volúmenes de hasta 1024 PiB, siendo un Pebibyte correspondiente a 1.125.899.906.842.624 bytes. También posee soporte añadido de extent, que es la capacidad de reservar un área contigua para un archivo, y de esta forma se puede reducir y hasta eliminar casi completamente la fragmentación de archivos. El ext4 es compatible con su versión anterior versión ext3, y ext4 se puede montar como una partición ext3. También se pueden montar las particiones ext3 como ext4. Aunque si la partición ext4 usa extent (una de las mayores mejoras), la compatibilidad con la versión anterior no es posible. Por este motivo la opción extent no es usada por defecto. A pesar de que las mejoras disminuyen de forma considerable la necesidad de defragmentación, posee la característica de defragmentación en vivo de ext4, que no está disponible en 2.6.28 pero probablemente lo estará en su próxima versión, con una herramienta llamada e4defrag que puede defragmentar archivos individuales o todo el sistema de archivos
-Los sistemas operativos no trabajan con unidades físicas directamente sino con unidades lógicas. Dentro de una misma unidad física de disco duro puede haber varias unidades lógicas. Cada una de estas unidades lógicas constituye una partición del disco duro. Esto quiere decir que podemos dividir un disco duro en, por ejemplo, dos particiones (dos unidades lógicas dentro de una misma unidad física) y trabajar de la misma manera que si tuviésemos dos discos duros (una unidad lógica para cada unidad física).
Sistemas de archivos
-Un sistema de archivos es una estructura que permite tanto el almacenamiento de información en una partición como su modificación y recuperación. Para que sea posible trabajar en una partición es necesario asignarle previamente un sistema de archivos. Esta operación se denomina dar formato a una partición.
Generalmente cada sistema de archivos ha sido diseñado para obtener el mejor rendimiento con un sistema operativo concreto (FAT para DOS, FAT32 para Windows 98, NTFS para Windows NT, HPFS para OS/2…). Sin embargo, es usual que el mismo sistema operativo sea capaz de reconocer múltiples sistemas de archivos. A continuación se comentan los sistemas de archivos más comunes.
FAT (File Allocate Table, tabla de asignación de archivos).
-Este sistema de archivos se basa, como su nombre indica, en una tabla de asignación de archivos o FAT. Esta tabla es el índice del disco. Almacena los grupos utilizados por cada archivo, los grupos libres y los defectuosos. Como consecuencia de la fragmentación de archivos, es corriente que los distintos grupos que contienen un archivo se hallen desperdigados por toda la partición. La FAT es la encargada de seguir el rastro de cada uno de los archivos por la partición.
Debido a que la FAT de este sistema de archivos tiene entradas de 16 bits (por eso, a veces se llama FAT16), sólo se pueden utilizar 216 = 65.536 grupos distintos. Esto implica que, con el fin de aprovechar la totalidad del espacio de una partición, los grupos tengan tamaños distintos en función del tamaño de la partición. Por ejemplo, con un grupo de 16 KB se puede almacenar hasta 216 grupos * 16 KB/grupo = 220 KB = 1 GB de información. El límite de la partición (2 GB) se obtiene al considerar un grupo máximo de 32 KB (formado por 64 sectores consecutivos de 512 bytes).
FAT32 (FAT de 32 bits)
-El sistema FAT32 permite trabajar con particiones mayores de 2 GB. No solamente esto, sino que además el tamaño del grupo (cluster) es mucho menor y no se desperdicia tanto espacio como ocurría en las particiones FAT. La conversión de FAT a FAT32, se puede realizar desde el propio sistema operativo Windows 98, o bien desde utilidades como Partition Magic. Sin embargo, la conversión inversa no es posible desde Windows 98, aunque sí desde Partition Magic.
VFAT (Virtual FAT)
Este sistema de archivos logra remediar uno de los mayores problemas del sistema FAT: los nombres de archivos y directorios sólo podían contener 8 caracteres de nombre y 3 de extensión. Con VFAT, se logra ampliar este límite a 255 caracteres entre nombre y extensión.
La mayor ventaja de VFAT es que tiene plena compatibilidad con FAT. Por ejemplo, es factible utilizar la misma partición para dos sistemas operativos que utilicen uno FAT y otro VFAT (MS-DOS y Windows 95). Cuando entremos desde MS-DOS, los nombres largos de archivos se transforman en nombres cortos según unas reglas establecidas, y pueden ser utilizados de la manera habitual. De todas maneras, hay que prestar cierta atención cuando se trabaja desde MS-DOS con archivos que tienen nombres largos: no se deben realizar operaciones de copiado o borrado, ya que se corre el riesgo de perder el nombre largo del archivo y quedarnos sólo con el corto. Desde Windows 95, se trabaja de forma transparente con nombres cortos y largos.
Tanto las particiones FAT como las VFAT están limitadas a un tamaño máximo de 2 GB. Esta es la razón por la que los discos duros mayores de este tamaño que vayan a trabajar con alguno de los dos sistemas, necesiten ser particionados en varias particiones más pequeñas. El sistema de arhivos FAT32 ha sido diseñado para aumentar este límite a 2 TB (1 terabyte = 1024 GB).
NTFS (New Technology File System, sistema de archivos de nueva tecnología).
-Este es el sistema de archivos que permite utilizar todas las características de seguridad y protección de archivos de Windows NT. NTFS sólo es recomendable para particiones superiores a 400 MB, ya que las estructuras del sistema consumen gran cantidad de espacio. NTFS permite definir el tamaño del grupo (cluster), a partir de 512 bytes (tamaño de un sector) de forma independiente al tamaño de la partición.
Las técnicas utilizadas para evitar la fragmentación y el menor desaprovechamiento del disco, hacen de este sistema de archivos el sistema ideal para las particiones de gran tamaño requeridas en grandes ordenadores y servidores
HPFS (High Performance File System)Es el sistema de archivos propio de OS/2.
-Utiliza una estructura muy eficiente para organizar los datos en las particiones.
No utiliza grupos sino directamente sectores del disco (que equivalen a un grupo de 512 bytes). En vez de utilizar una tabla FAT al principio de la partición, emplea unas bandas distribuidas eficazmente por toda la partición. De esta forma se consigue, suprimir el elevado número de movimientos que los cabezales de lectura/escritura tienen que realizar a la tabla de asignación en una partición FAT. El resultado de este sistema es una mayor velocidad de acceso y un menor desaprovechamiento del espacio en disco.
EXT4
El cuarto sistema de archivos extendido, es un sistema de archivos con registro por diario como una mejora compatible de ext3
-Posee un soporte de volúmenes de hasta 1024 PiB, siendo un Pebibyte correspondiente a 1.125.899.906.842.624 bytes. También posee soporte añadido de extent, que es la capacidad de reservar un área contigua para un archivo, y de esta forma se puede reducir y hasta eliminar casi completamente la fragmentación de archivos. El ext4 es compatible con su versión anterior versión ext3, y ext4 se puede montar como una partición ext3. También se pueden montar las particiones ext3 como ext4. Aunque si la partición ext4 usa extent (una de las mayores mejoras), la compatibilidad con la versión anterior no es posible. Por este motivo la opción extent no es usada por defecto. A pesar de que las mejoras disminuyen de forma considerable la necesidad de defragmentación, posee la característica de defragmentación en vivo de ext4, que no está disponible en 2.6.28 pero probablemente lo estará en su próxima versión, con una herramienta llamada e4defrag que puede defragmentar archivos individuales o todo el sistema de archivos
ACTIVIDADES
¿Qué sistemas operativos del mercado utilizan la tecnica de paginación para la ubicación de los procesos en memoria?
Windows y Linux
¿Qué sistemas operativos del mercado utilizan la técnica de swapping?
Linux
¿Qué tecnica es mas efectiva, la paginación, la segmentación o el swapping?
¿Qué es un programa residente?
-Son aquellos que una vez cargados en memoria, permanecerán en ella hasta que el ordenador se apague.
¿Es el procesador de texto word un programa residente?
No porque el Word no permanece en memoria hasta que el equipo se apaga, sino que se cierra antes.
¿Es un antivirus un programa residente?
Si, porque una vez cargados en memoria, permanecerán en memoria hasta que se apague el ordenador no cambia su ubicación en ningún momento.
¿Disponen todos los S.O. de interfaz tipo texto y tipo gráfico?
No, los S.O que usan interfaz tipo texto son DOS y UNIX, actualmente se usan interfaz gráfica puesto que facilita el uso del S.O.
¿Crees que existe algún tipo de S.O sin interfaz gráfica?
Si, el DOS Y el UNIXpor ejemplo solo tienen tipo texto
Analiza en la web los tipos de monitores de entrada/salida más comercializados y averigua en qué S.O. se pueden utilizar.
Windows y Linux
¿Qué sistemas operativos del mercado utilizan la técnica de swapping?
Linux
¿Qué tecnica es mas efectiva, la paginación, la segmentación o el swapping?
¿Qué es un programa residente?
-Son aquellos que una vez cargados en memoria, permanecerán en ella hasta que el ordenador se apague.
¿Es el procesador de texto word un programa residente?
No porque el Word no permanece en memoria hasta que el equipo se apaga, sino que se cierra antes.
¿Es un antivirus un programa residente?
Si, porque una vez cargados en memoria, permanecerán en memoria hasta que se apague el ordenador no cambia su ubicación en ningún momento.
¿Disponen todos los S.O. de interfaz tipo texto y tipo gráfico?
No, los S.O que usan interfaz tipo texto son DOS y UNIX, actualmente se usan interfaz gráfica puesto que facilita el uso del S.O.
¿Crees que existe algún tipo de S.O sin interfaz gráfica?
Si, el DOS Y el UNIXpor ejemplo solo tienen tipo texto
Analiza en la web los tipos de monitores de entrada/salida más comercializados y averigua en qué S.O. se pueden utilizar.
Gestión de Memoria
La labor de gestión de memoria consiste en llevar un registro de las partes de memoria que se estén utilizando y aquellas que no, con el fin de asignar espacio en memoria a los procesos cuando éstos la necesitan y liberándola cuando terminen, así como administrar el intercambio entre la memoria principal y el disco de los casos en los que la memoria principal y el disco en los casos en los que la memoria principal no le pueda dar capacidad a todos los procesos que tienen necesidad de ello.
Requisitos de la gestión de memoria
-Reubicación: La memoria principal se ubica generalmente compartida por varios procesos. En general el programador no puede conocer por adelantado, qué otros programas residirán en la memoria en el momento de la ejecución de su programa. El sistema operativo tiene que conocer la ubicación de la información de control del proceso y de la pila de ejecución, así como el punto de partida para comenzar la ejecución del programa para dicho proceso, ya que el sistema operativo gestiona la memoria y es responsable de traer el proceso a la memoria principal.
-Protección: Cada proceso debe protegerse contra inferencias no deseadas de otros procesos, sean accidentales o intencionadas. El código de un proceso no puede hacer referencia a posiciones de memoria de otros procesos, con fines de lectura o escritura, sin permiso, puesto que se desconoce la ubicación de un programa en la memoria principal, es imposible comprobar las direcciones absolutas durante la compilación para asegurar la protección.
Así, todas las referencias a la memoria generadas por un proceso deben comprobarse durante la ejecución para asegurar que solo hacen referencia al espacio de memoria destinado a dicho proceso, y los mecanismos que respaldan la reubicación también forman parte básica del cumplimiento de las necesidades de protección.
Requisitos de la gestión de memoria
-Reubicación: La memoria principal se ubica generalmente compartida por varios procesos. En general el programador no puede conocer por adelantado, qué otros programas residirán en la memoria en el momento de la ejecución de su programa. El sistema operativo tiene que conocer la ubicación de la información de control del proceso y de la pila de ejecución, así como el punto de partida para comenzar la ejecución del programa para dicho proceso, ya que el sistema operativo gestiona la memoria y es responsable de traer el proceso a la memoria principal.
-Protección: Cada proceso debe protegerse contra inferencias no deseadas de otros procesos, sean accidentales o intencionadas. El código de un proceso no puede hacer referencia a posiciones de memoria de otros procesos, con fines de lectura o escritura, sin permiso, puesto que se desconoce la ubicación de un programa en la memoria principal, es imposible comprobar las direcciones absolutas durante la compilación para asegurar la protección.
Así, todas las referencias a la memoria generadas por un proceso deben comprobarse durante la ejecución para asegurar que solo hacen referencia al espacio de memoria destinado a dicho proceso, y los mecanismos que respaldan la reubicación también forman parte básica del cumplimiento de las necesidades de protección.
Algoritmo de rueda (Round Robin)
La asignación de ejecución a los procesos se realiza de forma secuencial:
-A cada proceso se le asigna el mismo quantum o intervalo de tiempo de ejecución.
cuando llega un nuevo proceso, y hay otro en ejecución, los ciclos cpu se distibuyen entre ellos, pero ejecutandose antes un ciclo de cpu para el proceso que está en activo y no para el recién llegado, al que se le asignara su ciclo inmediatamente después
Actividades
1. si tenemos un proceso muy largo y muchos procesos cortos?cual es el mejor algoritmo de planificación a utilizar?
- Algoritmo de rueda
2. cuando todos los procesos tienen más o menos la misma duración¿ cuál es el algoritmo que mejor optimizar el tiempo cpu de varios procesos?
- Algoritmo FCFS
-A cada proceso se le asigna el mismo quantum o intervalo de tiempo de ejecución.
cuando llega un nuevo proceso, y hay otro en ejecución, los ciclos cpu se distibuyen entre ellos, pero ejecutandose antes un ciclo de cpu para el proceso que está en activo y no para el recién llegado, al que se le asignara su ciclo inmediatamente después
Actividades
1. si tenemos un proceso muy largo y muchos procesos cortos?cual es el mejor algoritmo de planificación a utilizar?
- Algoritmo de rueda
2. cuando todos los procesos tienen más o menos la misma duración¿ cuál es el algoritmo que mejor optimizar el tiempo cpu de varios procesos?
- Algoritmo FCFS
miércoles, 20 de octubre de 2010
miércoles, 13 de octubre de 2010
Bus de direciones
Bus de direcciones es un canal del microprocesador totalmente independiente del bus de datos donde se establece la dirección de memoria del dato en tránsito.
El bus de dirección consiste en el conjunto de líneas eléctricas necesarias para establecer una dirección.La capacidad de la memoria que se puede direccionar depende de la cantidad de bits que conforman el bus de direcciones
El bus de dirección consiste en el conjunto de líneas eléctricas necesarias para establecer una dirección.La capacidad de la memoria que se puede direccionar depende de la cantidad de bits que conforman el bus de direcciones
Apuntes
FUNCIONES
Una de las principales funciones de es la que permite al programa abstener la capa de hardware y utilizar una serie de llamadas al S.O. para que este sea el encargado de tratar a bajo nivel con los componentes físicos. Si no existiese esta funcionalidad, todo programador que en una aplicación necesitase grabar en un disco duro o disquete y/o imprimir en una impresora, debería escribir el código que le permita hacer esto, pero de forma individual para cada soporte, por lo tanto, si el programador solo incluyese funcionalidad para las impresoras marca A y B, si el usuario tiene una de marca C no podría utilizar las funciones de impresión. Por eso, en la definición de S.O. se dice que provee una interfaz entre las aplicaciones y el software.
La otra gran tarea de un S.O. es controlar el acceso y la utilización de los recursos del sistema y los distribuye de forma que los más voraces no lo consuman todo, dejando a los demás sin estos (recursos). Además también controla quien hace uso de estos recursos y en qué momento. Un S.O. debe poder conocer cuando un recurso está siendo utilizado y en qué momento está libre y dependiendo de esto, permitir o no su uso.
PROCESOS
Un proceso es la única forma en que un S.O. trata a un programa durante su ejecución. La multiprogramación permite administrar varios procesos en una sola CPU, alternando la ejecución de estos a través de controles de tiempo, asignándolos a medida que este límite es alcanzado.
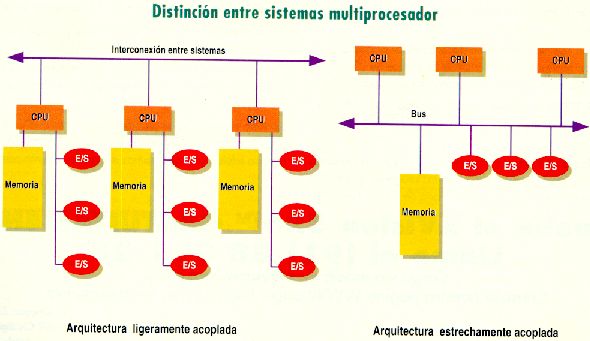
El multiprocesamiento se basa en la distribución de los procesos en múltiples procesadores.
La esencia del procesamiento distribuido es manejar todos los recursos de que dispone el conjunto distribuido como si fuesen una sola maquina.
ARCHIVOS
Son junto a los procesos el otro gran componente de un S.O. Todo proceso requiere para su ejecución que los datos que va a utilizar se encuentren físicamente en algún sitio; lo que hace el sistema de archivos precisamente es permitir que esta información se pueda organizar de manera lógica y sencilla. Todo S.O. debe brindar las herramientas (en forma de llamada al sistema o instrucciones) para que el sistema de archivos sea funcional. Entre las principales se pueden encontrar:
- Las de creación y destrucción de archivos.
- Apertura y cierre de los archivos.
- Los de lectura y escritura.
Adicionalmente también la mayoría de sistemas permiten tener cierto control sobre los archivos pudiendo asignar características como la seguridad.
Un archivo realmente es una colección de bytes relacionados bajo un único nombre.
Adicionalmente los archivos también se encuentran organizados bajo una estructura que los relaciona lógicamente. Esta estructura se denomina directorio (algunos sistemas los denominan también carpetas).
LLAMADAS AL SISTEMA
Son unas instrucciones especiales que usa el sistema para su comunicación con los programas y de estos hacia el sistema (pip, kill, open, close, mkdir, remdir, chdir).
NUCLEO DEL SISTEMA (kernel)
El kernel de un S.O. es el que se encarga de toda la comunicación entre hardware y software, así como de la administración del mismo.
INTERPRETE DE COMANDOS (Shell)
Es el componente del S.O. que le permite al usuario introducir órdenes al equipo. El Shell esconde los detalles internos del S.O. sobre el que esta ejecutándose.
Algunas personas denominan “Shell virtual” a las interfaces graficas del usuario (como Gnome o Windows), debido a su analogía en operaciones con el Shell tradicional.
CARACTERISTICAS DESEABLES DE UN S.O.
- Soporte a sistemas de archivos diferentes al nativo.
- Ejecución de aplicaciones compiladas para otras plataformas.
- Portabilidad
- Tamaño
- Interfaz
- Hardware mínimo sobre el que podría ejecutarse el S.O.
o Tipo y frecuencia del microprocesador
o Cantidad de RAM
o Memoria virtual y de swap.
o Compatibilidad con periféricos de otros fabricantes.
Una de las principales funciones de es la que permite al programa abstener la capa de hardware y utilizar una serie de llamadas al S.O. para que este sea el encargado de tratar a bajo nivel con los componentes físicos. Si no existiese esta funcionalidad, todo programador que en una aplicación necesitase grabar en un disco duro o disquete y/o imprimir en una impresora, debería escribir el código que le permita hacer esto, pero de forma individual para cada soporte, por lo tanto, si el programador solo incluyese funcionalidad para las impresoras marca A y B, si el usuario tiene una de marca C no podría utilizar las funciones de impresión. Por eso, en la definición de S.O. se dice que provee una interfaz entre las aplicaciones y el software.
La otra gran tarea de un S.O. es controlar el acceso y la utilización de los recursos del sistema y los distribuye de forma que los más voraces no lo consuman todo, dejando a los demás sin estos (recursos). Además también controla quien hace uso de estos recursos y en qué momento. Un S.O. debe poder conocer cuando un recurso está siendo utilizado y en qué momento está libre y dependiendo de esto, permitir o no su uso.
PROCESOS
Un proceso es la única forma en que un S.O. trata a un programa durante su ejecución. La multiprogramación permite administrar varios procesos en una sola CPU, alternando la ejecución de estos a través de controles de tiempo, asignándolos a medida que este límite es alcanzado.
El multiprocesamiento se basa en la distribución de los procesos en múltiples procesadores.
La esencia del procesamiento distribuido es manejar todos los recursos de que dispone el conjunto distribuido como si fuesen una sola maquina.
ARCHIVOS
Son junto a los procesos el otro gran componente de un S.O. Todo proceso requiere para su ejecución que los datos que va a utilizar se encuentren físicamente en algún sitio; lo que hace el sistema de archivos precisamente es permitir que esta información se pueda organizar de manera lógica y sencilla. Todo S.O. debe brindar las herramientas (en forma de llamada al sistema o instrucciones) para que el sistema de archivos sea funcional. Entre las principales se pueden encontrar:
- Las de creación y destrucción de archivos.
- Apertura y cierre de los archivos.
- Los de lectura y escritura.
Adicionalmente también la mayoría de sistemas permiten tener cierto control sobre los archivos pudiendo asignar características como la seguridad.
Un archivo realmente es una colección de bytes relacionados bajo un único nombre.
Adicionalmente los archivos también se encuentran organizados bajo una estructura que los relaciona lógicamente. Esta estructura se denomina directorio (algunos sistemas los denominan también carpetas).
LLAMADAS AL SISTEMA
Son unas instrucciones especiales que usa el sistema para su comunicación con los programas y de estos hacia el sistema (pip, kill, open, close, mkdir, remdir, chdir).
NUCLEO DEL SISTEMA (kernel)
El kernel de un S.O. es el que se encarga de toda la comunicación entre hardware y software, así como de la administración del mismo.
INTERPRETE DE COMANDOS (Shell)
Es el componente del S.O. que le permite al usuario introducir órdenes al equipo. El Shell esconde los detalles internos del S.O. sobre el que esta ejecutándose.
Algunas personas denominan “Shell virtual” a las interfaces graficas del usuario (como Gnome o Windows), debido a su analogía en operaciones con el Shell tradicional.
CARACTERISTICAS DESEABLES DE UN S.O.
- Soporte a sistemas de archivos diferentes al nativo.
- Ejecución de aplicaciones compiladas para otras plataformas.
- Portabilidad
- Tamaño
- Interfaz
- Hardware mínimo sobre el que podría ejecutarse el S.O.
o Tipo y frecuencia del microprocesador
o Cantidad de RAM
o Memoria virtual y de swap.
o Compatibilidad con periféricos de otros fabricantes.
lunes, 11 de octubre de 2010
Planificador
Definición de planificador:
es un componente funcional muy importante de los sistemas operativos multitarea y multiproceso, y es esencial en los sistemas operativos de tiempo real. Su función consiste en repartir el tiempo disponible de un microprocesador entre todos los procesos que están disponibles para su ejecución.
Tipos de algoritmos de planificación:
Planificación FCFS
El algoritmo FCFS, conocido como primero en llegar, primero en ser atendido.
Este algoritmo trabaja de la siguiente manera, al entrar un proceso al estado de “listo”, el bloque de control de proceso se ubica en el final de la cola, entonces el cpu al estar libre retirará de esta cola el primer elemento.
Es decir, en este algoritmo el tiempo de espera para que un proceso se ejecute es incierto y no mínimo. Pudiendo así ejecutarse dentro de la cpu un proceso que consuma demasiado tiempo, atrasando a otros procesos y dejando la cpu sin trabajo por lapsos de tiempo.
En definitiva este algoritmo hace que los procesos pequeños esperen a que un grande abandone la cpu. Una gran desventaja.
Planificación en SRT
Tiempo restante más corto (SRT): Apropiativo. Calculando los tiempos restantes, para lo cual se debe mantener la proporción inicial entre el tiempo real y el tiempo estimado.
Planificación por Prioridad
Esta clase de algoritmo utiliza como relación entre proceso, tiempo de la cpu y prioridad. De donde el proceso con mayor ráfaga tendrá la menor prioridad y viceversa.
Y donde la cpu podrá ser utilizada por el proceso con mayor prioridad.
Dentro de este algoritmo la prioridad es asignada ya sea interna o externamente. Pero, uno de los problemas que puede presentar esta planificación es la de un bloqueo indefinido. Es decir, pudiera darse el caso que existan procesos de prioridad alta que harían que los procesos de prioridad baja queden bloqueados hasta que logren colocarse en la cpu o perderse cuando nuestro sistema se caiga, es decir una espera indefinida.
Es aquí donde se puede aplicar una técnica conocida como envejecimiento, que ira incrementando la prioridad de los procesos en espera cada determinado tiempo hasta que estos se ejecuten. Y a mi parecer este es una de las mejores soluciones.
Planificación con RR
La planificación por turnos o Round Robin, se basa en una estructura FIFO de forma circular, en donde se asigna a los procesos un intervalo de tiempo para la cpu, conocido como quantum. En donde se establece la regla de que un proceso no podrá estar dos veces seguidas en la cpu a menos que sea el único en el estado de listo.
Este algoritmo trabaja de la siguiente manera, al ingresar el proceso a utilizar la cpu, este estará dentro del tiempo (quantum), si al terminar este tiempo el proceso no ha terminado es colocado al final y se ingresará otro proceso. Pero si el proceso pasa ha estado terminado antes de terminar su quantum, también será extraído de la cpu.
En cambio este algoritmo presenta complicaciones pues el tiempo de entrega de un proceso dependerá mucho más del tiempo (quantum) que de la magnitud del proceso.
Explicar cómo instalar un S.O. con maquina virtual.
1º Abrimos el virtualbox.
2º Click en Nueva.
3º Debemos asignar un nombre a nuestra máquina virtual, y seleccionamos el SO que vamos a usar, tenemos una gran cantidad de SO.
4º El siguiente paso sera elegir el tamaño de RAM que queremos dedicar.
5º Seleccionamos un disco duro virtual. Como se supone que es nuestra primera vez, debemos crear uno.
6º Seleccionar el disco duro virtual. Siguiente y Finalizamos el asistente.
Apuntes
SISTEMA DE PROTECCIÓN
- Ha de proteger los recursos asignados a mi proceso, evitando accesos a sus segmentos de memoria o escrituras en zonas del disco que él tenga en uso. Además, ha de evitar que los errores en un subsistema que está funcionando de forma incorrecta afecten al resto del sistema.
- Administrador de redes.
- La misión fundamental de este es el control de flujo de información dentro de la red en lo que afecta al propio sistema.
TIPOS DE S.O.
- Clasificación por estructura: monolíticos, con capas, microkernel, maquina virtual.
- Clasificación por servicios ofrecidos: monousuario, monotarea, multitarea, monoproceso, multiproceso.
- Clasificación por soporte a los servicios:
- Sistemas operativos de red.
- Sistemas distribuidos.
S.O. Monolíticos
- Construcción del programa final de módulos compilados separadamente que se unen a través del enlazador (o linker).
- Buena definición de parámetros de enlace entre las distintas rutinas existentes, lo que puede provocar mucho acoplamiento.
- Carecen de protecciones y privilegios al entrar a rutinas que manejan diferentes aspectos de los recursos del ordenador.
- Generalmente están hechos a medida, por lo que son eficientes y rápidos en su ejecución y gestión pero por lo mismo carecen de flexibilidad para soportar diferentes ambientes de trabajo u otro tipo de aplicaciones.
Tipos de S.O. con capas:
Programas usuario
Sistema de archivos
Shell (interprete de comandos)
Funciones de librería estándar
Kernel (núcleo) manejo de procesos y memoria
Hardware (procesador, memoria, discos, etc.)
S.O. con maquina virtual
Presenta una interfaz a cada proceso mostrando una maquina que parece idéntica a la maquina real subyacente
Ejemplo:
- VMware
- Virtual box
S.O. de red
Son aquellos que tienen la capacidad de interactuar con S.O. en otras maquinas por medio de un medio de transmisión. El punto crucial es que el usuario debe conocer la ubicación de los recursos que desea acceder.
S.O. distribuidos
Abarcan los servicios de red logrando integrar recursos en una sola maquina a la que el usuario accede de forma transparente.
ADMINISTRADOR DE LA MEMORIA PRINCIPAL (RAM)
La ejecución concurrente de procesos origina la necesidad de repartir la memoria entre todos ellos. La forma más usual es la de crear un espacio de direcciones virtuales en el cual la memoria es mucho mayor que la capacidad física real.
Las actividades de control de almacenamiento más importantes que hay que realizar son:
- Controlar la relación entre el espacio de direcciones virtual y el almacenamiento real.
- Controlar que zonas de memoria se están usando y que proceso las usa así como proteger las zonas de memoria de cada proceso de posibles accesos de otros procesos.
- Decidir que procesos serán cargados en memoria cuando quede espacio disponible.
- Asignar espacio para satisfacer los requerimientos de las aplicaciones y recuperar espacio que quede libre tras la terminación de un proceso o mediante la apropiación.
ADMINISTRADOR DE PROCESOS SUS FUNCIONES SON:
- Crear y eliminar los procesos de usuario y del sistema
- Mantener las estructuras necesarias para la caracterización de los procesos en especial, el mantenimiento de la tabla de procesos, donde almacena la información referente a todos los procesos que hay en el sistema (en Windows ctrl+alt+supr abre el visor de tareas).
- Suspender, apropiar y reanudar los procesos.
- Proporcionar los mecanismos para la comunicación entre procesos.
- Proporcionar los mecanismos necesarios para la sincronización de procesos y definir la política de reparto del tiempo de ejecución.
- Proporcionar los mecanismos para evitar, o manejar, los bloqueos mutuos. Este problema ocurre cuando varios procesos producen una espera circular de recursos que llevan a que ninguno de ellos pueda continuar la ejecución.
AMINISTRADOR DEL ALMACENAMIENTO SECUNDARIO
El enorme flujo de información que ha de gestionar un sistema operativo moderno hace que la gestión del almacenamiento secundario, generalmente en dispositivos magnéticos u ópticos sea fundamental para el rendimiento del sistema. La mayoría de las aplicaciones y datos han de permanecer en el almacenamiento secundario hasta que su presencia sea requerida en el almacenamiento principal las. Las tareas fundamentales que se han de cumplir son:
- Administración espacio libre y de la asignación de espacio que sea requerido por los procesos.
- Administración de las operaciones sobre disco, como el aseguramiento de las peticiones de acceso para optimizar el tiempo de respuesta.
ADMINISTRADOR DE ENTRADA SALIDA
Su misión es la de ocultar todo lo relacionado con las particularidades hardware de E/S sus funciones fundamentales son:
- Gestión de un sistema de memoria temporal intermedia que cree un sistema de cache con los dispositivos de entrada salida.
- Creación de una interfaz general con los controladores de dispositivos para un acceso uniforme.
- Creación de los controladores específicos para cada periférico.
ADMINISTRADOR DE ARCHIVOS
- Creación y eliminación de archivos
- Creación y eliminación de directorios.
- Proporcionar las operaciones primitivas necesarias para la manipulación de archivos y directorios.
- Relación entre la organización lógica y la organización física de los dispositivos de almacenamiento.
- Gestión del espacio libre.
- Gestión de la seguridad del sistema de archivos, y la protección tanto frente a otros usuarios como a fallos del sistema.
viernes, 8 de octubre de 2010
Planificación de Procesos
Definición de planificador:
es un componente funcional muy importante de los sistemas operativos multitarea y multiproceso, y es esencial en los sistemas operativos de tiempo real. Su función consiste en repartir el tiempo disponible de un microprocesador entre todos los procesos que están disponibles para su ejecución.
Tipos de algoritmos de planificación:
Planificación FCFS
El algoritmo FCFS, conocido como primero en llegar, primero en ser atendido.
Este algoritmo trabaja de la siguiente manera, al entrar un proceso al estado de “listo”, el bloque de control de proceso se ubica en el final de la cola, entonces el cpu al estar libre retirará de esta cola el primer elemento.
Es decir, en este algoritmo el tiempo de espera para que un proceso se ejecute es incierto y no mínimo. Pudiendo así ejecutarse dentro de la cpu un proceso que consuma demasiado tiempo, atrasando a otros procesos y dejando la cpu sin trabajo por lapsos de tiempo.
En definitiva este algoritmo hace que los procesos pequeños esperen a que un grande abandone la cpu. Una gran desventaja.
Planificación en SRT
Tiempo restante más corto (SRT): Apropiativo. Calculando los tiempos restantes, para lo cual se debe mantener la proporción inicial entre el tiempo real y el tiempo estimado.
Planificación en SRTF
Es similar al sjf, con la diferencia de que si un nuevo proceso pasa a listo se activa el dispatcher para ver si
es más corto que lo que queda por ejecutar del proceso en ejecución. Si es así, el proceso en ejecución pasa a listo y
su tiempo de estimación se decrementa con el tiempo que ha estado ejecutándose.
En SRTF se penaliza a las ráfagas largas (como en SJF). Un punto débil de este algoritmo se evidencia cuando
una ráfaga muy corta suspende a otra un poco más larga, siendo más larga la ejecución en este orden al ser preciso
un cambio adicional de proceso y la ejecución del código del planificador.
Planificación con RR
La planificación por turnos o Round Robin, se basa en una estructura FIFO de forma circular, en donde se asigna a los procesos un intervalo de tiempo para la cpu, conocido como quantum. En donde se establece la regla de que un proceso no podrá estar dos veces seguidas en la cpu a menos que sea el único en el estado de listo.
Este algoritmo trabaja de la siguiente manera, al ingresar el proceso a utilizar la cpu, este estará dentro del tiempo (quantum), si al terminar este tiempo el proceso no ha terminado es colocado al final y se ingresará otro proceso. Pero si el proceso pasa ha estado terminado antes de terminar su quantum, también será extraído de la cpu.
En cambio este algoritmo presenta complicaciones pues el tiempo de entrega de un proceso dependerá mucho más del tiempo (quantum) que de la magnitud del proceso.
Explicar cómo instalar un S.O. con maquina virtual.
1º Abrimos el virtualbox.
2º Click en Nueva.
3º Debemos asignar un nombre a nuestra máquina virtual, y seleccionamos el SO que vamos a usar, tenemos una gran cantidad de SO.
4º El siguiente paso será elegir el tamaño de RAM que queremos dedicar.
5º Seleccionamos un disco duro virtual. Como se supone que es nuestra primera vez, debemos crear uno.
6º Seleccionar el disco duro virtual. Siguiente y Finalizamos el asistente.
viernes, 1 de octubre de 2010
Interfaz
INTERFAZ GRÁFICA DE USUARIO
La interfaz gráfica de usuario, conocida también como GUI (del inglés graphical user interface) es un programa informático que actúa de interfaz de usuario, utilizando un conjunto de imágenes y objetos gráficos para representar la información y acciones disponibles en la interfaz. Su principal uso, consiste en proporcionar un entorno visual sencillo para permitir la comunicación con el sistema operativo de una máquina o computador.
INTERFAZ GRÁFICA TACTIL
Interfaz KDE
KDE es un proyecto de software libre para la creación de un entorno de escritorio e infraestructura de desarrollo para diversos sistemas operativos como GNU/Linux, Mac OS X, Windows, etc.
De acuerdo con su página web, «KDE es un entorno de escritorio contemporáneo para estaciones de trabajo Unix. KDE llena la necesidad de un escritorio amigable para estaciones de trabajo Unix, similar a los escritorios de Mac OS X o Windows».[4]
Las aplicaciones KDE están traducidas a más de 88 idiomas[3] y están construidas con los principios de facilidad de uso y de accesibilidad moderna en mente. Las aplicaciones de KDE 4 funcionan de forma completamente nativa en GNU/Linux, BSD, Solaris, Windows y Mac OS X.
La «K», originariamente, representaba la palabra «Kool»,[5] pero su significado fue abandonado más tarde.
La mascota del proyecto es un pequeño dragón llamado Konqi.
La interfaz gráfica de usuario, conocida también como GUI (del inglés graphical user interface) es un programa informático que actúa de interfaz de usuario, utilizando un conjunto de imágenes y objetos gráficos para representar la información y acciones disponibles en la interfaz. Su principal uso, consiste en proporcionar un entorno visual sencillo para permitir la comunicación con el sistema operativo de una máquina o computador.
INTERFAZ GRÁFICA TACTIL
Interfaz KDE
KDE es un proyecto de software libre para la creación de un entorno de escritorio e infraestructura de desarrollo para diversos sistemas operativos como GNU/Linux, Mac OS X, Windows, etc.
De acuerdo con su página web, «KDE es un entorno de escritorio contemporáneo para estaciones de trabajo Unix. KDE llena la necesidad de un escritorio amigable para estaciones de trabajo Unix, similar a los escritorios de Mac OS X o Windows».[4]
Las aplicaciones KDE están traducidas a más de 88 idiomas[3] y están construidas con los principios de facilidad de uso y de accesibilidad moderna en mente. Las aplicaciones de KDE 4 funcionan de forma completamente nativa en GNU/Linux, BSD, Solaris, Windows y Mac OS X.
La «K», originariamente, representaba la palabra «Kool»,[5] pero su significado fue abandonado más tarde.
La mascota del proyecto es un pequeño dragón llamado Konqi.
La interfaz GNOME
GNOME es similar a la mayoría de los entornos de escritorios tradicionales. Maneja ventanas, aplicaciones y archivos como en la mayoría de los sistemas operativos actuales.
En su configuración por defecto, el escritorio posee un menú lanzador para acceso rápido a los programas instalados y a la localización de archivos; las ventanas abiertas pueden ser accedidas por una barra de tareas alojada en el inferior de la pantalla, y en la esquina superior derecha está el área de notificación, para que los programas muestren información mientras se ejecutan de fondo. De todas maneras, estas características pueden ser movidas o reemplazadas según los deseos del usuario.
La apariencia de GNOME puede ser cambiada con el uso de temas, siendo los temas por defecto Bluecurve y Clearlooks.
GNOME es similar a la mayoría de los entornos de escritorios tradicionales. Maneja ventanas, aplicaciones y archivos como en la mayoría de los sistemas operativos actuales.
En su configuración por defecto, el escritorio posee un menú lanzador para acceso rápido a los programas instalados y a la localización de archivos; las ventanas abiertas pueden ser accedidas por una barra de tareas alojada en el inferior de la pantalla, y en la esquina superior derecha está el área de notificación, para que los programas muestren información mientras se ejecutan de fondo. De todas maneras, estas características pueden ser movidas o reemplazadas según los deseos del usuario.
La apariencia de GNOME puede ser cambiada con el uso de temas, siendo los temas por defecto Bluecurve y Clearlooks.
Actividades Págs 43 y 45
7.-¿Todos los procesos que gestiona un S.O pertenece al propio S.O?No, los procesos pueden pertenecer al usuario, como por ejemplo el proceso de winword.exe o también pueden permanecer al S.O
8.-¿Quién se encarga de poner en contacto los periféricos con el ordenador?El chipset. Su función es comunicar las unidades funcionales del equipo, con los dispositivos de E/S.
Actividades Págs 38, 40 - 42
1.- ¿Pueden ser multiusuarios todos los S.O actuales?
No, también existen varios sistemas operativos monousuario como los de los móviles.
No, también existen varios sistemas operativos monousuario como los de los móviles.
2.- ¿Puede un S.O servido explotarse como S.O cliente?
Si se puede utilizar, para trabajar con un programa.
3.- ¿ Necesitan servicios todos los S.O para poder funcionar?
Si, los servicios proporcionan a los usuarios aplicaciones que incorporan diversas formas de poder utilizar los recursos del S.O.
5.- ¿Todos los S.O gestionan la memoria en bloques?
No, hay algunos qe no gestionan la memoria en bloques.
*.- Dentro de los diferentes tipos de S.O que hemos caracterizado, ¿donde encuadrarías el sistema iOs?
Es un sistema usado por Apple. Es un sistema monousuario y monotarea.
Si se puede utilizar, para trabajar con un programa.
3.- ¿ Necesitan servicios todos los S.O para poder funcionar?
Si, los servicios proporcionan a los usuarios aplicaciones que incorporan diversas formas de poder utilizar los recursos del S.O.
5.- ¿Todos los S.O gestionan la memoria en bloques?
No, hay algunos qe no gestionan la memoria en bloques.
*.- Dentro de los diferentes tipos de S.O que hemos caracterizado, ¿donde encuadrarías el sistema iOs?
Es un sistema usado por Apple. Es un sistema monousuario y monotarea.
viernes, 24 de septiembre de 2010
Mejor S.O.
Ningún sistema operativo podemos decir que es el mejor, pues el que es mejor para una cosa, puede ser peor para otras...
¿Es mejor Windows o Linux?
Linux, en muchos aspectos, es mejor que Windows pero... intenta por ejemplo escanear una foto en Linux... en Windows instalas el driver y listo, en Linux.. buscar el driver, compilarlo posiblemente, instalarlo, configurarlo, cargarlo como módulo o meterlo en el propio kernel; Windows es más fácil de utilizar que Linux.
Cada sistema puede tener algo bueno o muy bueno, pero eso no le convierte en el mejor.
El mejor sistema operativo es aquel que más se adecua a las necesidades del usuario y, el mejor sistema operativo para tu profesor, puede ser el peor para ti, o viceversa, el mejor para ti puede ser el peor para tu profesor.
¿Es mejor Windows o Linux?
Linux, en muchos aspectos, es mejor que Windows pero... intenta por ejemplo escanear una foto en Linux... en Windows instalas el driver y listo, en Linux.. buscar el driver, compilarlo posiblemente, instalarlo, configurarlo, cargarlo como módulo o meterlo en el propio kernel; Windows es más fácil de utilizar que Linux.
Cada sistema puede tener algo bueno o muy bueno, pero eso no le convierte en el mejor.
El mejor sistema operativo es aquel que más se adecua a las necesidades del usuario y, el mejor sistema operativo para tu profesor, puede ser el peor para ti, o viceversa, el mejor para ti puede ser el peor para tu profesor.
miércoles, 22 de septiembre de 2010
-Monousuario: es un sistema operativo que sólo puede ser ocupado por un único usuario en un determinado tiempo. Ejemplo de sistemas monousuario son las versiones domésticas de Windows.Administra recursos de memoria procesos y dispositivos de las PC'S.

-Multiusuario: es un concepto de sistemas operativos, pero en ocasiones también puede aplicarse a programas de ordenador de otro tipo. En general se le llama multiusuario a la característica de un sistema operativo o programa que permite proveer servicio y procesamiento a múltiples usuarios simultáneamente.

-Monotarea: es aquel sistema operativo que solamente puede ejecutar un proceso (programa) a la misma vez. Es una característica de los sistemas operativos más antiguos como MS-DOS pues en la actualidad la mayoría de los sistemas de propósito general son multitarea.

-Monoproceso: es aquél que es capaz de manejar solamente un procesador de la computadora, de manera que si la computadora tuviese más de uno le sería inútil. El ejemplo más típico de este tipo de sistemas es el DOS y MacOS.

-Multiproceso: es el número de procesadores del sistema, que es más de uno y éste es capaz de usarlos todos para distribuir su carga de trabajo. Generalmente estos sistemas trabajan de dos formas: simétrica o asimétricamente.

-Distribuidos: es un nuevo modelo para resolver problemas de computación masiva utilizando un gran número de computadoras organizadas en racimos incrustados en una infraestructura de telecomunicaciones distribuida.

-En red: es un componente software de una computadora que tiene como objetivo coordinar y manejar las actividades de los recursos del ordenador en una red de equipos. Consiste en un software que posibilita la comunicación de un sistema informático con otros equipos en el ámbito de una red.

-Multiusuario: es un concepto de sistemas operativos, pero en ocasiones también puede aplicarse a programas de ordenador de otro tipo. En general se le llama multiusuario a la característica de un sistema operativo o programa que permite proveer servicio y procesamiento a múltiples usuarios simultáneamente.

-Monotarea: es aquel sistema operativo que solamente puede ejecutar un proceso (programa) a la misma vez. Es una característica de los sistemas operativos más antiguos como MS-DOS pues en la actualidad la mayoría de los sistemas de propósito general son multitarea.

-Monoproceso: es aquél que es capaz de manejar solamente un procesador de la computadora, de manera que si la computadora tuviese más de uno le sería inútil. El ejemplo más típico de este tipo de sistemas es el DOS y MacOS.

-Multiproceso: es el número de procesadores del sistema, que es más de uno y éste es capaz de usarlos todos para distribuir su carga de trabajo. Generalmente estos sistemas trabajan de dos formas: simétrica o asimétricamente.
-Distribuidos: es un nuevo modelo para resolver problemas de computación masiva utilizando un gran número de computadoras organizadas en racimos incrustados en una infraestructura de telecomunicaciones distribuida.
-En red: es un componente software de una computadora que tiene como objetivo coordinar y manejar las actividades de los recursos del ordenador en una red de equipos. Consiste en un software que posibilita la comunicación de un sistema informático con otros equipos en el ámbito de una red.

Distintos tipos de S.O.
Una de las principales funciones es la que permite al programador abstraer la capa de hadware y utilizar una serie de llamadas al sistema operativo para que este sea el encargado de tratar a bajo nivel con los componentes físicos. Si no existiese esta funcionalidad, todo programador que en una aplicación necesitase grabar en un disco duro o disquete y/o imprimir en una impresora, debería escribir el código que le permita hacer esto, pero de forma individual para cada soporte, por lo tanto si el programador solo incluye funcionalidad para las impresoras marca A y B, si el usuario tiene una de marca C no podría utilizar las funciones de impresión. Por eso en la definición de sistema operativo se dice que provee una interfaz entre las aplicaciones y el hardware.
La otra gran tarea de un sistema operativo y la utilización de los recursos del sistema y los distribuye de forma que los más voraces, no lo consuman todo, dejando a los demás sin recursos, además también controla quien hace uso de estos recursos y en que momento. Un S.O. debe poder reconocer cuando un recurso está siendo utilizado y en que momento está libre, y dependiendo de esto, permitir o no su uso.

La otra gran tarea de un sistema operativo y la utilización de los recursos del sistema y los distribuye de forma que los más voraces, no lo consuman todo, dejando a los demás sin recursos, además también controla quien hace uso de estos recursos y en que momento. Un S.O. debe poder reconocer cuando un recurso está siendo utilizado y en que momento está libre, y dependiendo de esto, permitir o no su uso.

Suscribirse a:
Comentarios (Atom)